Camera-Based BEV Perception: Cost-Effective Alternative to LiDAR for Autonomous Vehicles

Camera-Only BEV Perception System
The Challenge
How can we make autonomous vehicles affordable? LiDAR sensors cost $10,000-$80,000 but are considered essential for perception. I set out to eliminate this requirement.
The Solution
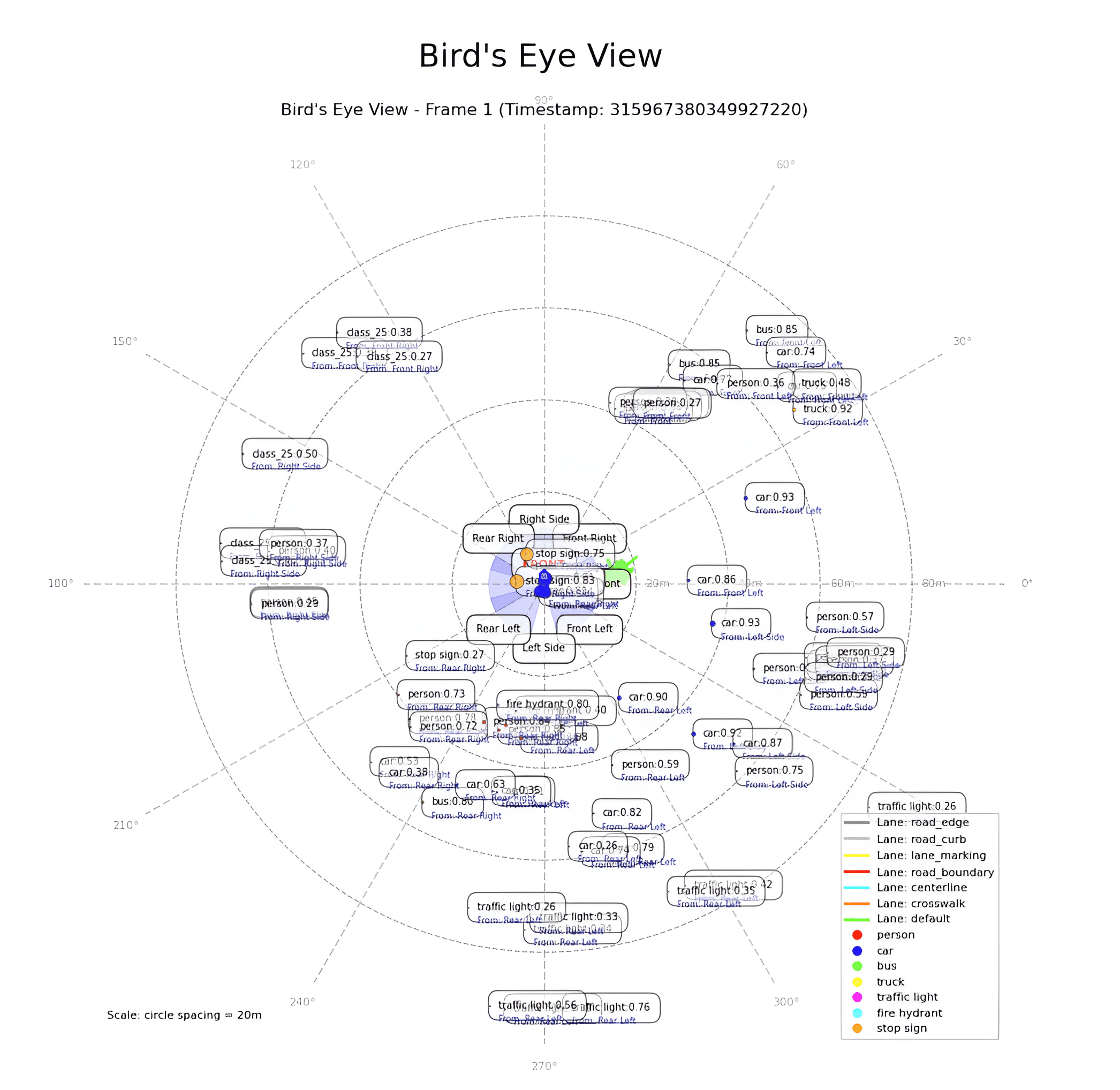
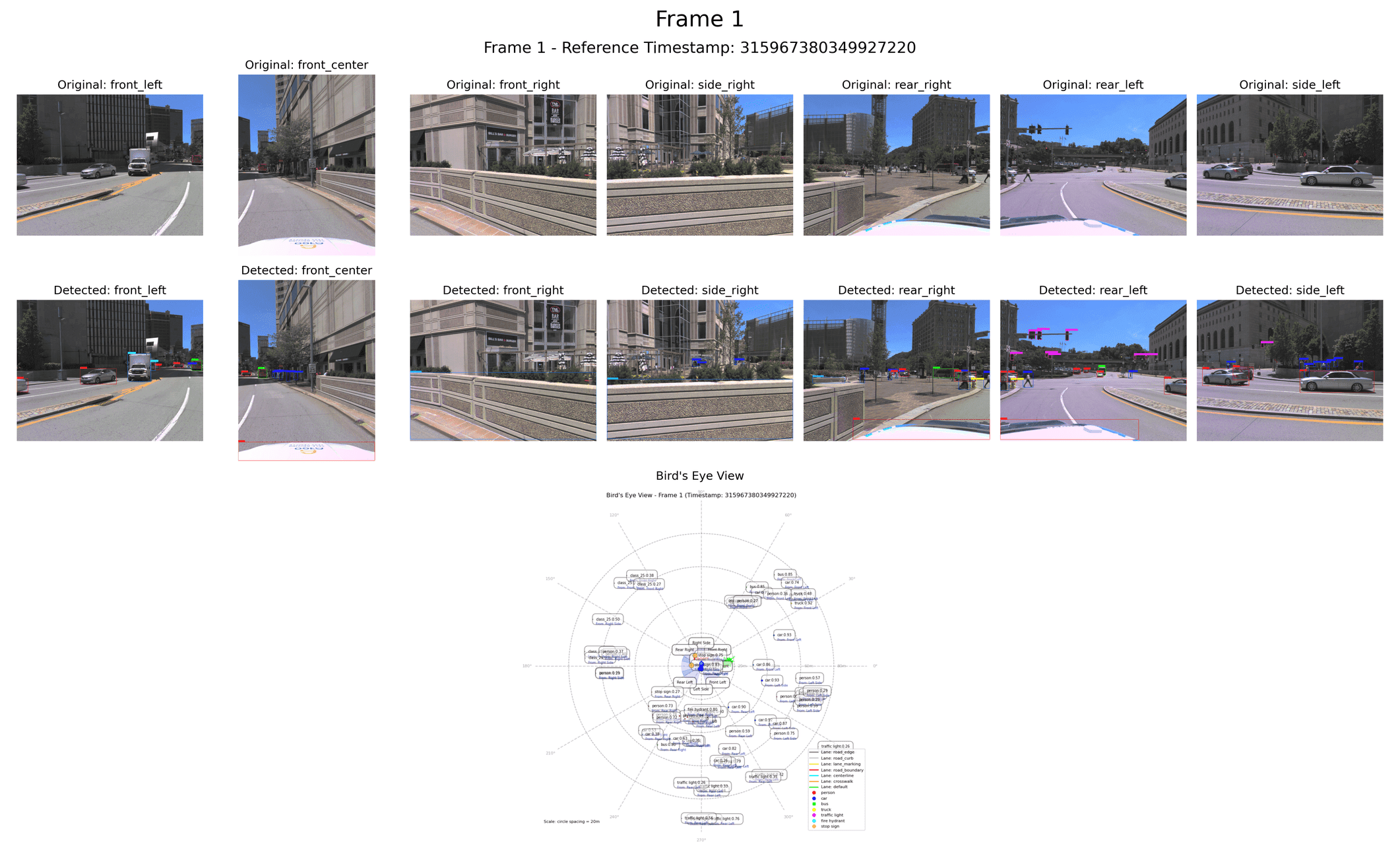
I developed a neural system that transforms regular camera inputs into high-quality Bird's Eye View (BEV) maps – matching 85-90% of LiDAR's accuracy at a fraction of the cost.
Key Achievements
✅ 85-90% object detection rate compared to LiDAR
✅ $10,000-$80,000 hardware cost eliminated
✅ 360° perception using 7 synchronized cameras
✅ Real-time performance (15-20 FPS on consumer hardware)
How It Works
The system uses three key innovations:
Advanced Depth Estimation – DepthAnythingV2 model predicts accurate depth from monocular camera views
Lift-Splat-Shoot Architecture – Neural pipeline transforms 2D images to 3D space, then to BEV representation
Multi-View Fusion – Combines overlapping camera views for complete 360° environmental awareness
Technologies Used
Deep Learning: PyTorch, YOLOv11, U-Net
Computer Vision: OpenCV, Quaternion-based transformations
Languages: Python, C++
Performance: CUDA, Mixed-precision training
Results
Metric | Camera-Only | LiDAR |
|---|---|---|
Cost | $300-500 | $10,000+ |
Object Detection | 85-90% | 98% |
Position Error | ~1.2m | ~0.1m |
Impact
This technology could dramatically reduce the cost of autonomous vehicles, making self-driving technology more accessible while maintaining critical safety capabilities.
"This approach aligns with Tesla's vision-only strategy, demonstrating that cameras can provide sufficient environmental understanding for autonomous navigation at a fraction of the hardware cost."
See It In Action
The project uses convolutional neural networks and depth estimation to transform standard camera inputs into comprehensive Bird's Eye View maps without expensive LiDAR hardware.




